

4.1. Способ перемены плоскостей проекций
Чаще всего геометрические объекты расположены относительно плоскостей проекций в общем положении, и при решении задач для достижения поставленной цели необходимо выполнять много построений.
Количество построений можно значительно сократить, если геометрические элементы будут расположены в частном положении относительно плоскостей проекций.
Существуют два основных способа преобразования чертежа, при которых:
- Объект остаётся неподвижным, при этом меняется аппарат проецирования;
- Условия проецирования не меняются, но изменяется положение объекта в пространстве.
К первому способу относится способ перемены плоскостей проекций.
Ко второму – способ вращения (вращение вокруг линии уровня и вращение вокруг проецирующей прямой); способ плоскопараллельного перемещения.
Рассмотрим наиболее часто используемые способы при решении задач.
Способ перемены плоскостей проекций или способ введения дополнительных плоскостей проекций (ДПП) позволяет перейти от заданной системы плоскостей проекций к новой системе, более удобной для решения той или иной задачи.
Рассмотрим положение точки А относительно известной системы плоскостей проекций π2⊥π1 (Рисунок 4.1, а и б).
Введём π4⊥π1, при этом получим новую систему двух взаимно перпендикулярных плоскостей. Положение точки А на эпюре будет в этом случае задано проекциями А1 и А4.
Правила перемены плоскостей проекций:
- Новая плоскость проекций вводится перпендикулярно, по крайней мере, одной из заданных на чертеже плоскостей проекций;
- ДПП располагается относительно проецируемого объекта в частном положении, удобном для решения поставленной задачи;
- Новую плоскость совмещаем вращением вокруг новой оси проекций с плоскостью, которой она перпендикулярна на свободное место так, чтобы проекции не накладывались друг на друга.
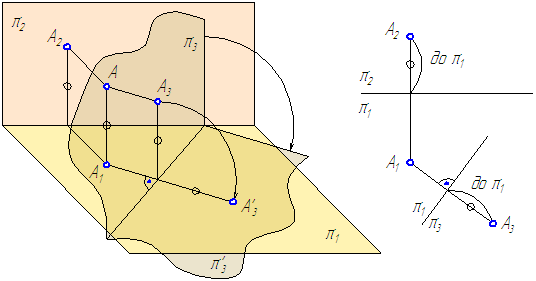
а б
Рисунок 4.1 – Способ перемены плоскостей проекций
Свойства:
- На чертеже новая проекция геометрического элемента находится на линии связи, перпендикулярной новой оси проекций:
А1А4 ⊥ π1/π4.
- Расстояние от А4 до π1/π4 равно расстоянию от А2 до π2/π1, так как величина этих отрезков (отмечены ○) определяет расстояние от точки А до плоскости проекций π1.
При решении задачи необходимо заранее обдумать, как расположить новую плоскость проекций относительно заданных геометрических объектов (прямой, плоскости и др.), и как на чертеже провести новую ось проекций, чтобы в новой системе плоскостей заданные объекты заняли бы частные положения по отношению к новой плоскости проекций.
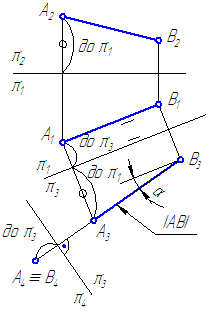
Рисунок 4.2
Упражнение
1. Спроецировать отрезок общего положения АВ в точку.
Последовательность решения:
- Введём ДПП π4//А1В1 и π4⊥π1 (Рисунок 4.2). В новой системе двух взаимно перпендикулярных плоскостей проекций π1/π4 отрезок АВспроецируется на π4 в натуральную величину и по этой проекции можем определить угол наклона отрезка к плоскости проекций π1
(α=∠А4В4; π1/π4).
- Введём ДПП π5⊥А4В4 и π5⊥π4. На π4 отрезок АВ спроецируется в точку, то есть А5≡В5, что означает АВ⊥π5.
Упражнение
2. Дана плоскость общего положения – σ, заданная треугольником АВС (Рисунок 4.3).
Определить истинную величину треугольника.
Последовательность решения:
- Введём ДПП π4⊥σ и π4⊥π1, для чего построим горизонталь в плоскости треугольника и проведём новую ось проекций π1/π4⊥g1согласно теореме о перпендикуляре к плоскости. На π4 плоскость σ спроецируется в прямую, что означает σ⊥πp4.
- Введём ДПП π5//σ (π4/π5//А4В4С4) и π4⊥π5. На π5 проекция А5В5С5 – есть истинная величина треугольника.
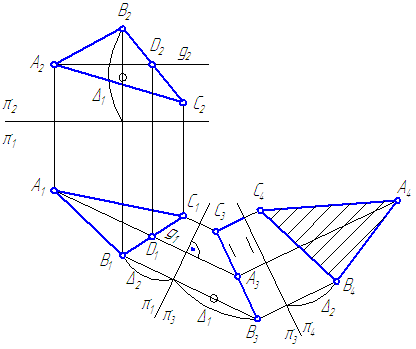
Рисунок 4.3
4.2. Способ вращения
Сущность способа вращения состоит в том, что положение системы плоскостей проекций считается неизменным в пространстве, а положение проецируемого объекта относительно неподвижных плоскостей изменяется.
Из сравнения сущности обоих способов видно, что решение задач, которые требуют применения преобразования ортогонального чертежа, может быть выполнено любым из этих способов, результат при этом должен получиться одинаковым. Основа выбора того или иного способа – рациональность решения.
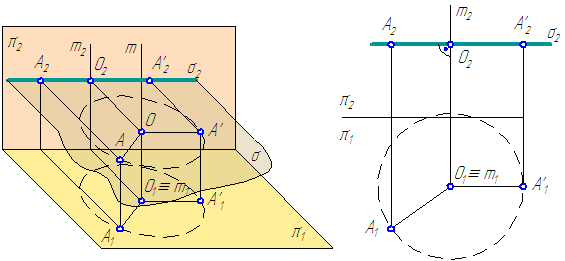
Вращение заданных элементов будем осуществлять вокруг проецирующей прямой, то есть прямой, перпендикулярной какой-либо плоскости проекций, при этом все точки заданных элементов поворачиваются в одну и ту же сторону на один и тот же угол (Рисунок 4.4, а и б). Ось вращения и объект вращения составляют твёрдое тело.
Введём обозначения:
m⊥π2 – ось вращения;
А – точка в пространстве;
О – центр вращения точки А;
АО – радиус вращения
а б
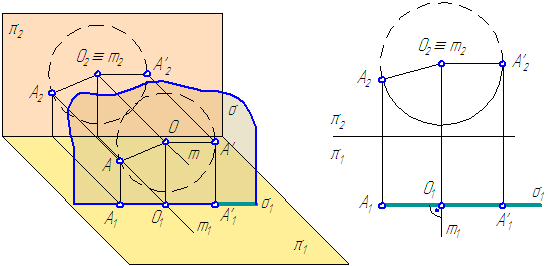
Рисунок 4.4 – Способ вращения вокруг прямой, перпендикулярной π2
Точка описывает в пространстве окружность радиусом АО. Плоскость окружности перпендикулярна оси вращения (σ⊥m).
Так как m⊥π2 , то σ//π2, следовательно, σ⊥π1, ⇒ σ1⊥m1, и поэтому σ проецируется на π1 в виде прямой, перпендикулярной проекции оси вращения, а на π2 траектория вращающейся точки проецируется в виде окружности с центром О2≡m2.
Пусть ось вращения m⊥π1 (Рисунок 4.5, а и б). Плоскость окружности σ⊥m.
а б
Рисунок 4.5 – Вращение вокруг прямой, перпендикулярной π1
\left.\begin{array}{l}\sigma\parallel\pi_1\\\sigma\perp \pi_2\\\end{array}\right\} npu\;m\perp\pi_1\Longrightarrow\sigma_2\perp m_2
Свойства проекций
- На плоскость проекций, перпендикулярную оси вращения, траектория вращающейся вокруг этой оси точки проецируется без искажения, то есть в окружность с центром, совпадающим с проекцией оси вращения на эту плоскость и радиусом, равным расстоянию от вращаемой точки до оси вращения.
- На плоскость проекций, параллельную оси вращения, траектория вращающейся точки проецируется в отрезок, перпендикулярный проекции оси вращения на эту плоскость.
- На плоскость проекций, перпендикулярную оси вращения, проекция вращаемого объекта своих размеров и формы не меняет.
Упражнение
Дано: отрезок общего положения – АВ.
Определить: способом вращения истинную величину отрезка и углы наклона его к плоскостям проекций.
Решение
1. Выберем ось вращения m⊥π1 и проходящую через точку В (Рисунок 4.6).
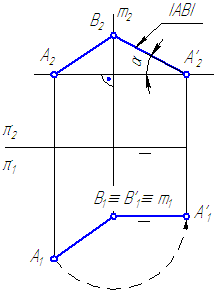
Рисунок 4.6
На плоскости проекций π2 проекция траектории перемещения точки А – прямая,
A_2 \overline{A_2}\perp m_2\;u\;A_2\overline{A_2}\parallel\pi_2/\pi_1На плоскости проекций π1 проекция траектории перемещения точки А – окружность радиусом |А1В1|.
Повернем отрезок до положения, параллельного плоскости проекций π2. Получим натуральную величину отрезка.
\overline{A}_2\overline{B}_2\parallel\pi_2/\pi_1\Rightarrow AB\parallel\pi_2\Rightarrow\overline{A}_2\overline{B}_2=|AB|Угол наклона отрезка АВ к плоскости проекций π1 будет угол
\alpha=\angle\widehat{A_2\overline{A}_2;\;\overline{A}_2\overline{B}_2}.
Для того, чтобы определить угол наклона АВ к плоскости проекций π2, надо ввести новую ось вращения перпендикулярно π2 и повторить построения.
4.3. Определение истинной величины треугольника способом вращения
Пусть плоскость σ задана треугольником. Необходимо определить истинную величину треугольника (Рисунок 4.7).
Одним поворотом вокруг оси, перпендикулярной к плоскости проекций, истинную форму треугольника получить нельзя (так же как и введением одной ДПП).
Вращая вокруг оси m, перпендикулярной π1 можно расположить плоскость ΔАВС⊥π2 (а вращая вокруг оси n⊥π2 можно расположить плоскость ΔАВС⊥π1).
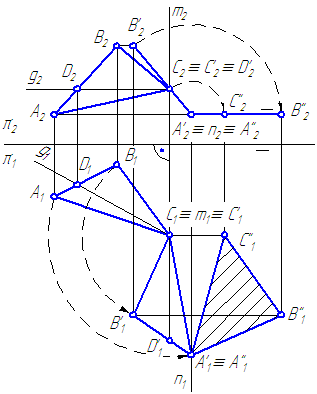
Рисунок 4.7
- Положим σ’ должна быть перпендикулярна π2. Для чего построим CD – горизонталь h плоскости σ. Введём первую ось вращения m⊥π1, например, через точку С.
- Повернём треугольник вокруг m до положения, когда
\overline{CD}\perp\pi_2\Rightarrow\overline{C}_1\overline{D}_1\perp\pi_2/\pi_1
На основании 3-го свойства, новая горизонтальная проекция треугольника \overline{A_1B_1C_1} по величине должна равняться A1B1C1, а фронтальная проекция треугольника будет представлять отрезок. - Введём вторую ось вращения n⊥π2 через точку \overline{A}_2. Повернём фронтальную проекцию \overline{B_2C_2A_2} в новое положение \overline{\overline{B_2}\overline{C_2}\overline{A_2}}\parallel\pi_2/\pi_1. На π1 получим треугольник \overline{\overline{B_1}\overline{C_1}\overline{A_1}}, равный истинной величине треугольника АВС.
4.4. Задачи для самостоятельной работы
Двумя способами преобразования ортогонального чертежа:
1. Определить расстояние от точки D до отрезка АВ – общего положения (Рисунок 4.8).
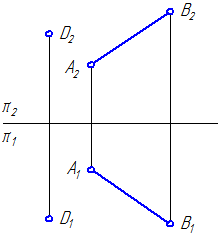
Рисунок 4.8
2. Определить расстояние между двумя параллельными прямыми общего положения (АВ//CD) (Рисунок 4.9).
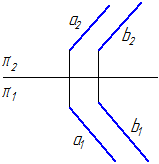
Рисунок 4.9
3. Определить расстояние между двумя скрещивающимися прямыми, заданными отрезками АВ и CD (Рисунок 4.10).
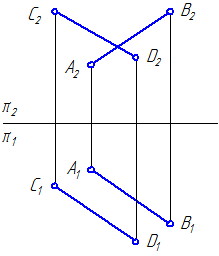
Рисунок 4.10
4. Построить недостающую проекцию точки D при условии, что задана σ=ΔАВС – общего положения и первая проекция точки D1, Dотстоит от плоскости σ на 30 мм (Рисунок 4.11).
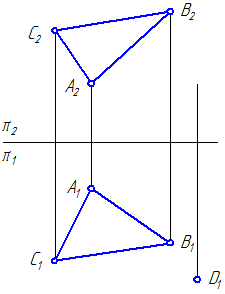
Рисунок 4.11
5. Дан отрезок АВ – общего положения. Ось вращения не проходит через АВ (Рисунок 4.12). Определить способом вращения истинную величину АВ.
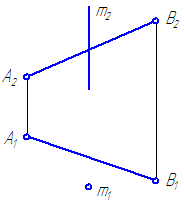
Рисунок 4.12
6. Задана прямая общего положения m и точка А вне прямой. Построить плоскость, проходящую через точку А и перпендикулярную прямой m (Рисунок 4.13).
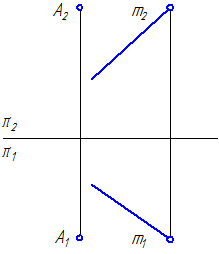
Рисунок 4.13
